Con un nuevo algoritmo incorpora un paso de comprobación de retrasos en la información
Cuando un equipo de drones trabaja en el mismo espacio aéreo, por ejemplo, fumigando un campo de maíz, corren riesgo de que choquen entre sí.
Para ayudar a evitar costosos choques, los investigadores del Instituto de Tecnología de Massachusetts (MIT), presentaron hace tres años el sistema llamado MADER.
Este planificador de trayectorias multiagente permitía a un grupo de drones formular trayectorias óptimas y libres de colisiones.
“El objetivo era que cada dron transmitiera su trayectoria para que los demás sepan hacia dónde planea dirigirse. Así, cada agente tiene las trayectorias de los otros cuando optimizan las suyas para asegurarse de no colisionar”, afirmaron los investigadores.
Sin embargo, cuando el equipo del MIT probó el sistema con drones reales, descubrió que si un dron no dispone de información actualizada sobre las trayectorias de sus compañeros, puede seleccionar inadvertidamente una trayectoria que provoque una colisión.
Por lo que, los investigadores renovaron su sistema y ahora presentaron su Robust MADER, que genera trayectorias sin colisiones incluso cuando las comunicaciones entre los agentes sufren retrasos.
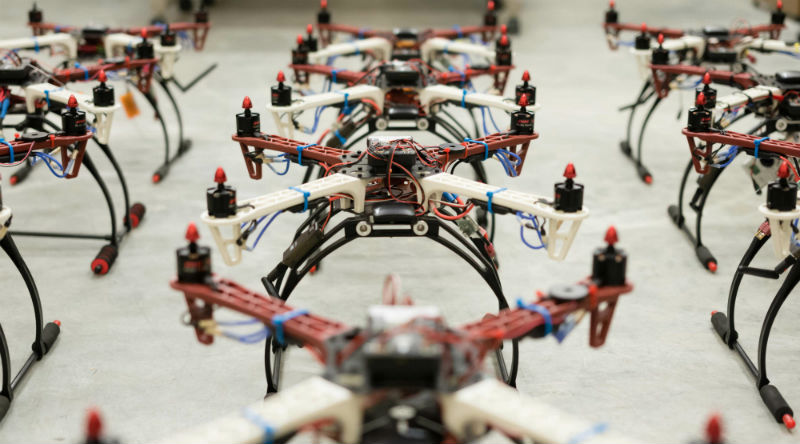
“MADER funcionaba muy bien en simulaciones, pero no se había probado en hardware. Así que construimos un montón de drones y empezamos a hacerlos volar. Los drones necesitan comunicarse entre sí para compartir trayectorias, pero una vez que empiezas a volar, te das cuenta enseguida de que siempre hay retrasos en las comunicaciones que introducen algunos fallos”, afirmó Kota Kondo, estudiante de postgrado de aeronáutica y astronáutica del MIT.
Ahora, el nuevo algoritmo incorpora un paso de comprobación de retrasos en el que el dron espera un tiempo determinado antes de comprometerse con una nueva trayectoria optimizada. Si recibe información adicional de otros drones durante el periodo de retardo, puede abandonar su nueva trayectoria y empezar de nuevo el proceso de optimización.








Facebook comments